

자율주행 기술에서 운전자가 운전에 개입하지 않는 Level 4 이상의 고도자율주행을 위해서는 cm급 위치정밀도를 가지는 자차 측위 기술이 반드시 필요합니다. 출발지와 목적지 사이의 정확한 경로를 결정하고 도로정보와 연계하여 인간 운전자 수준으로 안전한 주행을 하기 위해서는 ADAS 수준의 환경인지 센서만으로는 고정밀 측위가 불가능하기 때문입니다.
고정밀 측위를 위한 도로 인프라는 정밀지도(High Definition Map)와 이를 가능하게 하는 Cloud 서버/통신 등이 있습니다. 정밀지도는 차선 정보, 가드레일, 도로 곡률·경사, 신호등·표지판 위치, 교통 표식 등의 3차원 도로 환경정보가 포함됩니다. 정밀지도는 정적(Static) 정보만 담고 있으나, 실제 자율주행을 위해서는 공사(사고) 구간이나 차량 정체 정보 등 시시각각 변화하는 동적(Dynamic) 정보도 제공할 수 있습니다. 이에 대하여 이에 대하여 국제표준규격으로 LDM(Local Dynamic Map)이 있습니다.
1. 정밀지도 구축의 필요성
1) 위성항법시스템은 환경적 영향에 의해서 발생하는 오차가 커서 이것에만 의존해서는 자율주행에서 요구하는 정확도 수준으로 자차 위치를 계산하는 것이 사실상 불가능합니다. 이에 대한 방안으로 GPS, 관성측정장치(IMU), 카메라 및 라이다(LiDAR) 등의 센서와 고정밀지도를 융합함으로써 센서로부터 측정된 객체(Object)의 거리와 미리 저장된 지도의 위치 정보를 비교하고 자차 위치를 정밀하게 보정하는 센서 융합 측위 기술이 널리 연구되고 있습니다.
2) 그러나 이 방법은 이동 거리와 시간이 경과되면 관성 오차가 누적되는 문제가 있습니다. 이를 극복하는 대안으로는 대표적으로 카메라와 같은 영상인식 센서를 이용하여 위치를 보정하는 기술이 가장 현실적으로 고려되고 있으며, 여기에는 각종 도로 정보 및 시설물 속성과 절대 좌표 정보가 포함된 고정밀지도가 필수적입니다.
3) 고정밀지도는 일반적인 도로의 정적 요소(차로, 차선, 도로 표시, 신호등의 위치, 교통 표지판 등)와 시간에 따라 변화하는 동적 요소(장애물, 공사구간, 교통 혼잡, 주변 차량, 보행자 등)로 구분됩니다. 자율주행의 정밀지도는 현재의 차량 네비게이션 지도와 목적은 다르지 않으나, 정적 요소는 더욱 정확한 위치 정보가 요구되며, 동적 요소는 빠른 갱신주기를 유지해야 하며, 이는 출발지에서 목적지까지 최적의 경로를 선택해서 안전하게 자율주행기능을 수행하기 위한 필수 요소입니다.
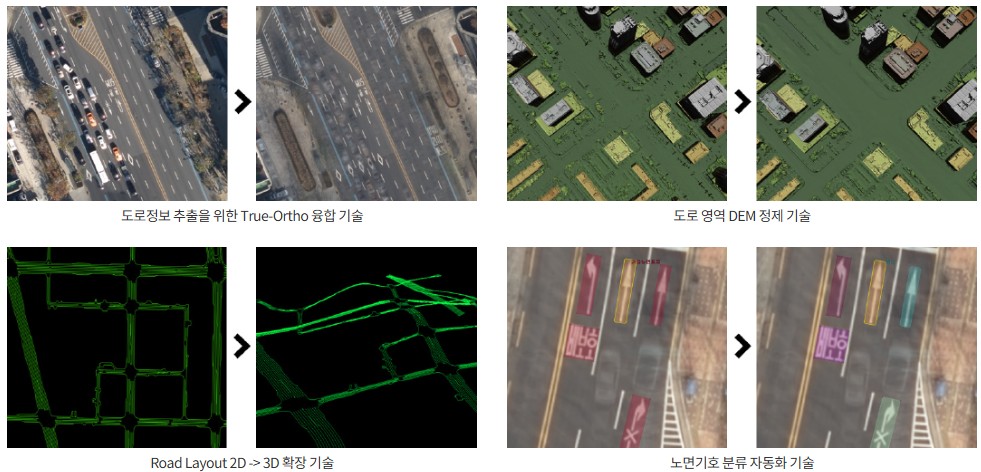
4) 지금까지 구축된 정밀지도는 데이터 수집 장치로 분석된 정보를 기준으로 개발자의 수작업 후처리 과정을 거쳐 제작하고 있으나, 더욱 정확하고 빠른 갱신이 가능한 정밀지도를 구축하고 배포하기 위해서 최근에는 자동으로 고정밀지도를 생성하는 연구가 활발하게 진행 중입니다.
2. 정밀지도기술
1) 고정밀 측위를 위한 도로인프라는 정밀지도(High Definition Map)와 Cloud 서버/통신 등입니다. 정밀지도는 차선 정보, 가드레일, 도로 곡률·경사, 신호등·표지판 위치,교통 표식 등의 3차원 도로 환경정보가 포함됩니다. 이 같은 정밀지도를 구축하려면 MMS(Mobile Mapping System) 장비를 갖춘 특수 목적의 측량 차량이 필요하며, MMS 장비는 고정밀 GPS, 관성항법장치(INS), 360도 카메라, 3차원 레이저 스캐너 등으로 구성됩니다.
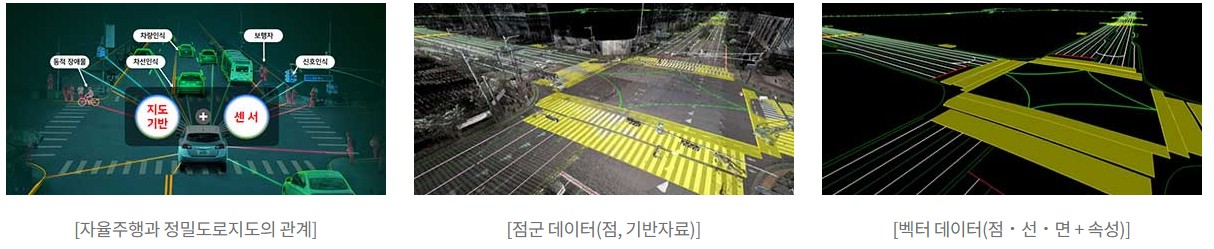
2) MMS 장비를 이용하는 정밀지도 구축 과정은 아래 그림과 같습니다. 계획 수립과정에서 차량 및 MMS 장비를 점검하고, 현장조사를 실시하여 위험요소 등을 분석하고, 노선 및 일정계획을 수립합니다. MMS 측량과정에서는 GNSS/INS 센서와 통합된 점군 데이터를 취득하여 MMS 표준자료를 제작합니다. 지도제작과정에서는 도화프로그램을 이용하여 세부도화작업과 정위치 편집, 레이어별 구조화 편집을 통해 지도를 완성합니다. 마지막 단계에서는 품질평가와 비식별화 등의 후처리 작업을 실시합니다.
3. LDM(Local Dynamic Map)
1) 고도자율주행기술은 센서 인지 범위의 한계를 극복하고 주행 방향의 교통정보를 정확하게 인지하기 위해서 C-ITS(Cooperative Intelligent Transport Systems) 기술과 융합하고 있습니다.
2) LDM은 지도 변경 정보, 교통상황, 신호 정보, 위험 정보 등을 정밀지도에 기록하고, V2X 메시지를 통해 자율주행 차량 제어기에 전달할 수 있게 합니다. 즉, 차량 이동정보, 신호/센서 정보, 날씨 정보, 공사 정보 등의 동적 정보를 실시간으로 제공합니다.
3) 현재의 C-ITS 서비스는 운전자가 정보를 판단하여 조작할 수 있도록 지원하고 있으나, 향후에는 자율협력주행서비스로 진화하여 동적 정보를 자율주행 제어기에 직접 전송하여 제어할 수 있게 될 것입니다.
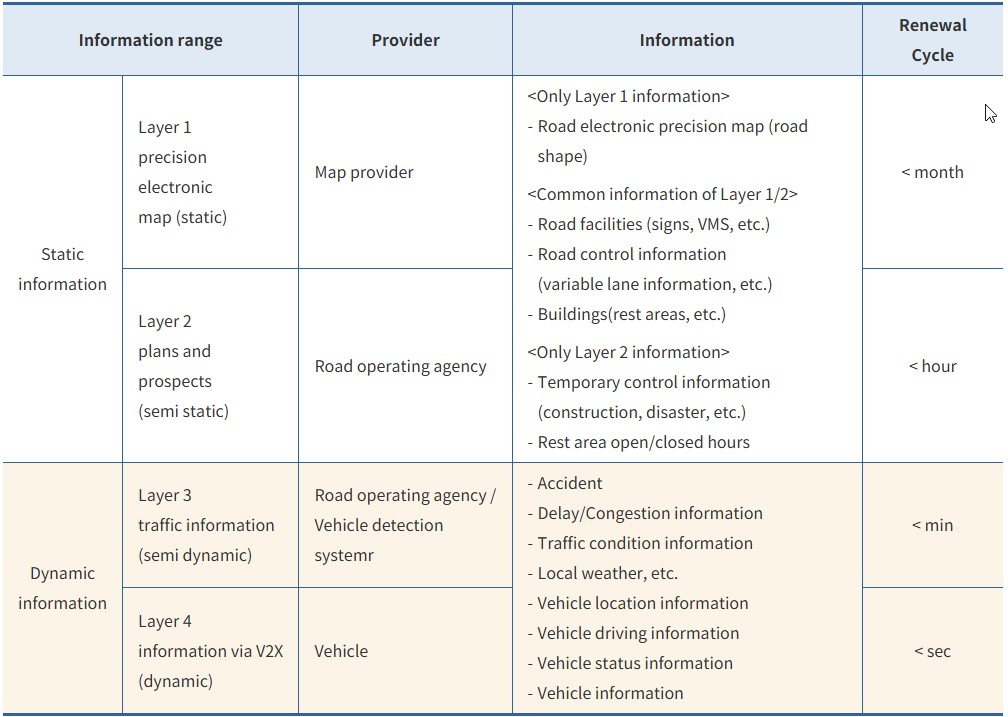
4) LDM은 그림 및 표와 같이 4개의 계층으로 구성되어 있습니다. 제 1계층은 정적정보인 정밀지도 데이터, 제 2계층은 도로의 제한속도, 주변 건물 등의 변동성이 적은 정적정보, 제 3계층은 교통 상황, 기상 상황 등의 일시적 변동이 있는 동적 정보, 제 4계층은 수시로 변동하는 차량, 보행자, 이륜차 등의 이동 물체 동적 정보로 구성되어 있습니다. 즉, LDM은 정적정보와 동적정보가 융합된 정밀지도 기반의 데이터 시스템이라 할 수 있습니다.
4. C-ITS와 LDM 자율협력주행시스템 비교
1) LDM 자율협력주행시스템은 도로 인프라 정보를 취합, 가공하여 운전자 개입없이 자율주행차에 직접 V2X 메시지로 송출합니다.
2) LDM 자율협력주행시스템에서는 C-ITS 인프라의 동적정보가 정적정보인 정밀지도와 융합되어 LDM 표준 규격으로 가공되고 실시간으로 정확한 위치정보를 생성하여 송출합니다.
| 구분 | C-ITS 도로인프라 시스템 | LDM 자율협력주행 도로인프라 시스템 |
| 서비스 목적 | 운전자에게 정보(텍스트/그림 표시) 제공 | 자율주행 제어기에게 수치화된 정보 제공 |
| 동적정보 수집방법 | 인프라 센서, 교통정보센터, 차량 | |
| 서비스 제공방법 | SAE J2735 메시지셋 | |
| 위치정보 생성방법 | 개발 단계에서 구축된 고정된 정보 사용 | 정밀지도를 이용하여 실시간 생성, 정확도 향상 |
| 서비스 가능수준 | 수집정보의 단순 전달 | 수집정보+지도 융합/가공된 정보 전달 |
| 도로변경시 대응 | 소프투에어 유지보수 개발 필요 | 정밀지도 갱신/배포로 대응 |
| 서비스 흐름도 |  |
 |
5. 국내외 동향
1) 국토지리원의 정밀도로지도는 자차위치 결정, 경로 설정ㆍ변경, 도로·교통 규제(차선, 정지선, 표지정보 등) 인지를 위한 자율주행 기본 인프라 2015년 구축에 착수하여 2019년 전국 고속국도, 2022년 전국 일반국도에 대한 정밀도로지도 구축을 완료하였으며, 시가지로 구축 대상 확대 중입니다.
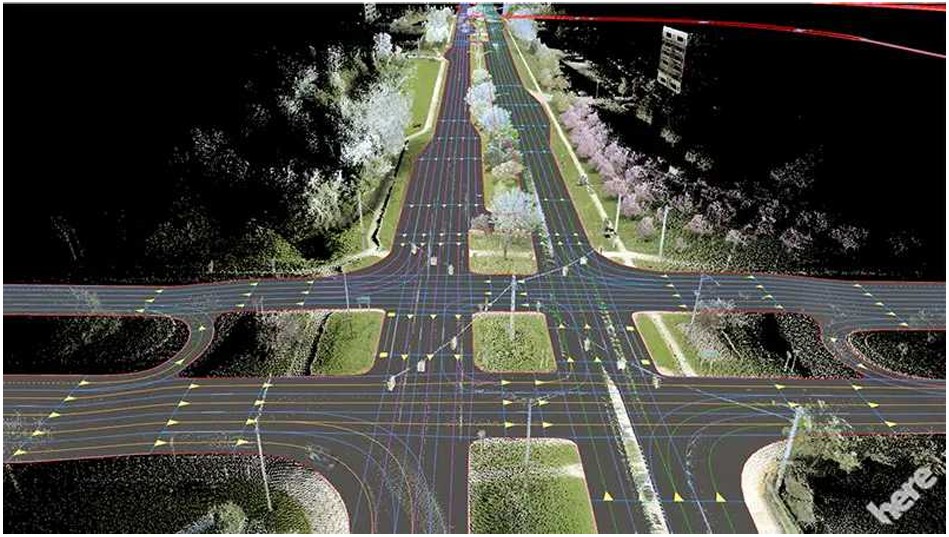
2) Daimler, BMW, Audi 독일 3사는 글로벌 지도 제작사인 HERE를 공동으로 인수하여 Road Model, HD Lane Model, HD Localization Model로 구성된 HD Live Map을 구축해서 자차 센서 데이터와의 융합을 통한 도심지 측위 기술을 개발하고 있습니다.

3) 일본은 민간(다수의 자동차 제조사, 지도 제작사 포함)과 공공이 함께 투자하여 디엠피 (Dynamic Map Platform: DMP)를 설립하고 일본 고속도로에 대한 정밀지도 구축을 진행하고 있습니다. 또한 리보니아에 본사를 둔 자율주행차 소프트웨어 회사인 Ushr Inc.가 일본 도쿄의 DMP(Dynamic Map Platform Co.)에 비공개 주가로 인수되었습니다.

4) 테슬라는 전방, 측/후방의 영상만을 활용한 위치 인지와 측위 시스템을 적용한 자율주행 차량(Autopilot 3.0)을 상용화하고 있습니다.

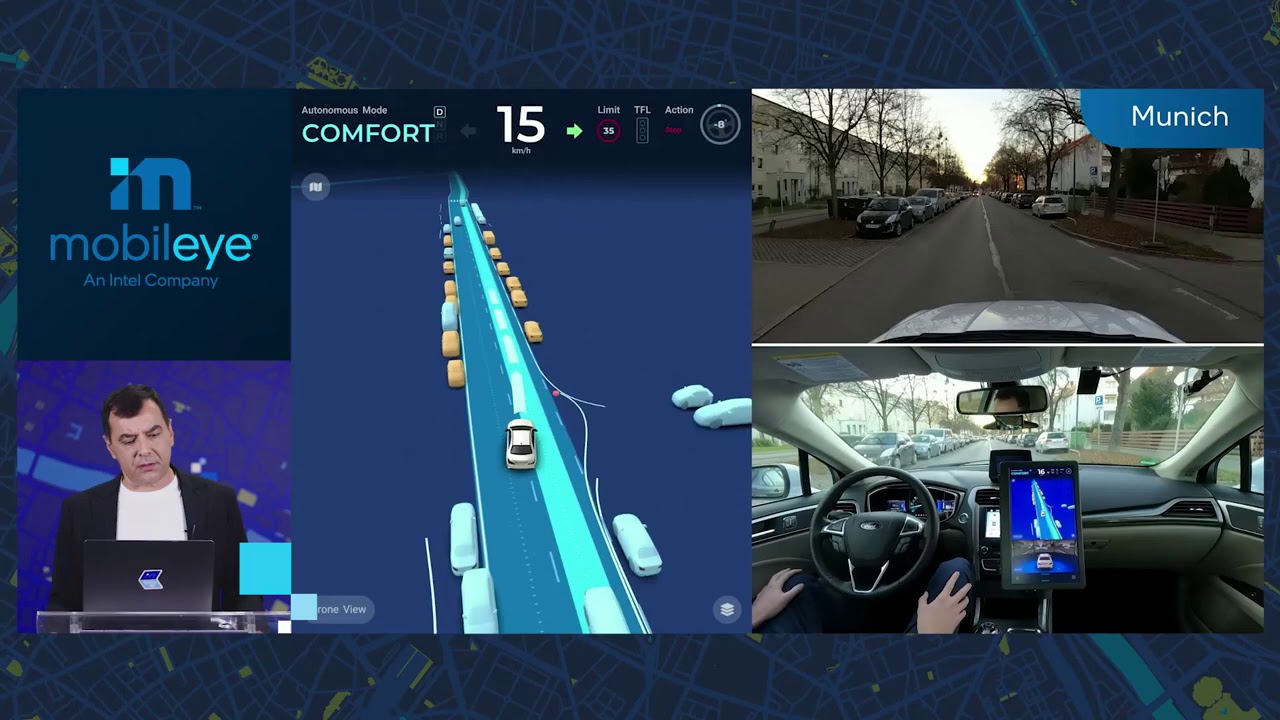
5) 모빌아이의 REM(Road Experience Management) 매핑 시스템은 EyeQ4 또는 4세대 시스템 온 칩이 장착된 소비자 차량을 활용하여 데이터를 Cloud Sourcing하여 정밀지도를 구축합니다. 그 데이터는 동영상이나 이미지가 아니라 킬로미터당 약 10킬로비트를 수집하는 압축된 텍스트입니다. 이 새로운 EyeQ Ultra칩의 개발에 정보를 제공한 매핑 기술은 Cloud를 통해 접속되어 앞으로 주행 가능한 경로에 대한 최신 정보를 실시간으로 제공합니다.
6) 국내기업인 42dot은 저가형 GNSS/IMU, 카메라, 자체 제작한 경량형 SDx Map을 활용해 자차 측위를 위한 3차원 기하정보 기반의 영상 SLAM 기술을 개발하였으며, 실제 도심 환경의 악의 조건에 강건한 저가형 측위 시스템의 상용화에 집중하고 있습니다.

5) 네이버랩스는 라이다, 카메라, 관성센서, Wheel Encoder 등의 다양한 센서로부터 획득된 데이터와 정밀지도를 결합한 측위 기술인 xDM 기술(eXtended definition & dimension map)과 기술과 고정밀 데이터를 통합하여 실내, 실외, 도로 등을 아우르며 음영 지역이 없는 정밀 측위 기술을 개발하고 있습니다.

6) 현대오토에버는 2011년부터 MMS 장비를 운영하여 국내 정밀지도 기술을 선도해 왔으며, 지도 자동화 구축기술인 MAC(Map Auto Creation)을 개발하여 기존에는 수작업으로 처리하던 데이터를 약 98% 이상 정확하게 자동으로 처리하고 있습니다.

1. https://www.ways1.com/service/ldm.php
2. [월간보고서]_2022_국내외_위치정보_산업_동향보고서_8월호 https://www.kisa.or.kr/20204/form?postSeq=177&page=1#fnPostAttachDownload
3. https://www.autoelectronics.co.kr/article/articleView.asp?idx=2802
4. http://www.jungwoo.or.kr/webzine/2022_02/a1.html
5. https://www.ngii.go.kr/kor/content.do?sq=210
7. https://www.dynamic-maps.co.jp/en/news/2019/0222.html
8. https://medium.com/self-driving-cars/deep-dive-on-mobileye-rem-maps-4a107d55acf0
'[04] 자율주행' 카테고리의 다른 글
| 08. 해외 자율주행 셔틀 서비스 (0) | 2024.08.24 |
|---|---|
| 07. 국내 자율주행 셔틀 서비스 (0) | 2024.07.28 |
| 05. V2X 메시지 (0) | 2024.07.07 |
| 04. 자율주행 시범운행지구 및 특례 (2) | 2024.05.05 |
| 03. 자율주행 환경 인식 기술 feat. 카메라, 레이더, 라이다, 센서 퓨전 (3) | 2023.12.17 |